
Remote Emission Sensing
Purpose, Objectives, and Key Question
The objective of this task is to evaluate and propose methods for using remote emission sensing (RES) — for policy purposes, as well as for direct enforcement — to detect high-emitting/gross-polluting vehicles in real-world traffic.
The project will comprise all vehicle categories (i.e., passenger cars, light-duty commercial vehicles, heavy-duty trucks, buses, and motorcycles) running on commonly used combustion fuels (i.e., petrol, diesel, and compressed/liquefied natural gas [CNG/LNG]) designed to meet all adopted legislative emission limits (e.g., Euro 1/I–Euro 6/VI). Special attention will be paid to high-emitting vehicles designed to meet the most recent emission standards, such as Euro 6. Target pollutants will be nitrogen oxide (NOx) and particulate matter (PM).
The project aims to evaluate and compare the performance and applicability of the following main types of RES technologies to identify high-emitting vehicles:
- Conventional RES (Type 1 RES): Technologies already offered on the market by commercial providers for emission measurement.
- Point sampling RES (Type 2 RES): Similar to Type 1/conventional RES but still under development (i.e., not yet commercialized), Type 2 RES demonstrates the best advantage for measuring PM emissions (both number and mass).
- Plume chasing RES (Type 3 RES): While Type 3 RES cannot measure emissions from as many vehicles as Types 1 and 2, the measurements are longer duration, making this type more useful for pinpointing high emitters.
The project will make use of existing RES datasets in Europe and China, as well as new datasets from upcoming RES measurement campaigns until early 2023.
The general outcome of Task 61 will be an independent comparison and evaluation of the performance of various RES technologies, focusing on their ability and usefulness to detect excess-emitting vehicles for direct enforcement, as well as emissions legislation and air pollution policy. The project will provide proposals on how RES can be practically applied for these purposes, covering both existing and future in-use fleets. The project’s final report will include the following:
- An “up-to-date” view of the real-world emission performance of European and Chinese in-use fleets, demonstrating the impact of current emissions legislation on the real-world emissions of vehicle categories — grouped by emission standard, vehicle manufacturer, engine family, etc., to reveal eventual gaps between on-road emissions and legislative emission limits.
- A comparison and evaluation of the performance of various RES technologies to accurately measure on-road emissions, and particularly to accurately pinpoint high- or excess-emitting vehicles on an individual vehicle level and on a vehicle model or engine family level.
- Proposals on how RES can be practically used to detect high-emitting vehicles for direct enforcement purposes as well as to monitor real-world emissions for emission legislation and air pollution policy purposes.
Activities
WP 1: Collection and consolidation of existing data
No further data were collected for Task 61 during 2024. The most recent consolidated data were already collected during the various RES measurement campaigns carried out in Europe and China in 2022 and reported in the AMF 2022 Annual Report. This goes also for the related portable emissions measurement sampling (PEMS) measurements and exhaust plume simulations. A milestone for European RES data was the launch of the new database (https://cares-public-app.azurewebsites.net/) developed in the City Air Remote Emission Sensing (CARES) project, finalized in June 2023 and partly open to the public. The number of (attempted) emission measurements stored in the database has exceeded 2.4 million. The new database contains RES Type 1 and 2 data.
WP 2: Comparison and evaluation of the performance of different RES technologies
The summary report of the three city demonstration measurement campaigns in the CARES project was published in 2023, providing an overview of the results from measurements collected using RES type 1, type 2, type 3, and PEMS [1] in Milan, Krakow, and Prague/Brno.
Several scientific papers providing more extensive and detailed comparisons and evaluations of RES Types 1, 2, and 3, based on the measurements carried out in the CARES project, were prepared and submitted to scientific journals in 2023 or early 2024 [2,3,4].
WP 3: Evaluation of using RES to detect individual high-emitting vehicles for enforcement
Based on both the test track and real-world setting measurements in the CARES project, we completed extensive work to evaluate the potential of RES Types 1, 2, and 3 to accurately detect individual high-emitting vehicles for both NOX and particulate matter for both light- and heavy-duty vehicles, representing newer vehicles than Euro 4 [4,5,6].
WP 4: Evaluation of using RES for emission legislation and air pollution policy purposes
We used the RES Type 1 data collected in the city demonstration measurement campaigns during the CARES project to analyze the emissions performance of petrol, diesel, and LPG/CNG passenger cars by Euro standard and by engine family up to Euro 6d [1,7].
WP 5: Project coordination and management, synthesis, reporting, and dissemination
In 2024, we reported activities and progress in Executive Committee meeting 67. Four Task 61 work meetings were arranged in 2024, focusing on preparation of the final Task 61 report and a final dissemination webinar arranged in early June.
Key Findings
- RES type 1, 2 and 3 data agree well with each other — as well as with PEMS — for NOX, but less well for PM, for which RES type 1 deviates from the other methods, especially for vehicles equipped with diesel particulate filters (i.e., vehicles with very low particle emissions). The agreement for NOX for RES Type 1, Type 2, and PEMS can be seen in Figure 1.
- Applied in the right manner, all three types of RES are capable of detecting individual high-emitting vehicles with regard to both NOx and PM emissions; however, for RES Types 1 and 2, single measurements are not sufficient to avoid significant errors.
- RES Type 1 seems best applied for exploring the efficiency of and compliance with light-duty vehicle emissions legislation, in particular for NO and for evaluating air pollution policies related to road transport, such as the way to design and assess the impact of Low Emission Zones.
- REST Type 2 seems best applied for evaluating PM emissions and identifying vehicles equipped with non-functional or not fully functional diesel particulate filters.
- RES Type 3 seems best applied for detecting heavy-duty vehicles with failing selective catalytic reduction (SCR) systems.
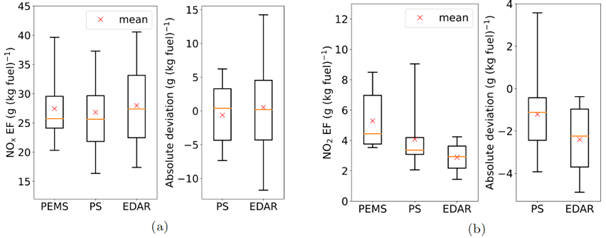
Figure 1. (a) Comparison of NOx-fuel-based emission factors (EFs) measured with PEMS, RES Type 2 (point sampling [PS]) and RES Type 1 (emissions detection and reporting [EDAR]). Left: Boxplots of the EFs. Right: Deviation of PS and EDAR measurements compared to PEMS. (b) Comparison of fuel-based NO2 EFs measured with PEMS, PS, and EDAR. Left: Boxplots of the EFs. Right: Deviation of PS and EDAR measurements compared to PEMS.
Main Conclusions
- There are many valid and promising applications of RES. Considering that the three different types have complementary features, they may well be applied in assembly, not only as single systems.
- To identify tampered vehicles, RES may be the only option but would require a shift from some of today’s focus on periodic technical inspections (PTIs) to roadside inspections, in which case, all types of RES have proven capable of drastically increasing officials’ efficiency in catching gross polluters.
- RES technologies and associated pollutant measurement and auxiliary instruments are continuously being further developed to improve performance and meet new challenges to reduce road vehicle emissions.
Publications
- Bernard, Y., et al. (2023) CARES deliverable D3.4 — Summary report on partner cities’ measurements campaigns. https://cares-project.eu/city-measurement-summary/.
- Knoll, M., M. Penz, C. Schmidt, D. Pöhler, T. Rossi, S. Casadei, Y. Bernard, Y., Å. Hallquist, Å. Sjödin, and A. Bergmann (2024) Evaluation of the point sampling method and inter-comparison of remote emission sensing systems for screening real-world car emissions (2024) Sci. Tot. Env., 932, 171710. https://doi.org/10.1016/j.scitotenv.2024.171710.
- Knoll, M., Penz, M., Juchem, H., Schmidt, C., Pöhler, D., and Bergmann, A. (2024) Large-scale automated emission measurement of individual vehicles with point sampling Atmos. Meas. Tech., 17, 2481–2505. https://doi.org/10.5194/amt-17-2481-2024.
- Schmidt, C., Carslaw, C. D., Farren, J. N., Gijlswijk, N. R., Knoll, M., Ligterink, E. N., Lollinga, J. P., Pechout, M., Schmitt, S., Vojtíšek, M., Vroom, Q., & Pöhler, D. (2025) Optimisation and validation of Plume Chasing for robust and automated NOx and particle vehicle emission measurements Atm. Env.: X, 25, Article 100317. https://doi.org/10.1016/j.aeaoa.2025.100317.
- Borken-Kleefeld, et al. (2023) CARES deliverable D4.8 — Final Report on High-emitter & clean vehicle identification. https://cares-project.eu/high-emitter-profiles/.
- Sjödin, Å., et al. (2023) New knowledge on high-emitters and on-road emissions from the H2020 CARES project. Presentation at the Task Force on Emission Inventories and Projections Annual Meeting, Oxford, April 2023. https://www.tfeip-secretariat.org/oxford-2023.
- Bernard, Y., et al. (2023) CARES deliverable D4.5 — Report on real-world emission factors and impact of low-emission zones. https://cares-project.eu/emission-factors-lez-impact/.
The Final Task 61 Report and associated Key Messages can be downloaded from: https://www.iea-amf.org/content/projects/map_projects/61.
|
Project Duration |
May 2020 - May 2024 |
|
Participants Task Sharing Cost Sharing |
China, Denmark, Finland, Sweden, Switzerland None |
|
Total Budget |
EUR 210,000 (USD 229,165) |
|
Task Manager |
Åke Sjödin |
